ARS-DETR
Introduction
论文题目 :ARS-DETR: Aspect Ratio Sensitive Oriented Object Detection with Transformer
论文地址 :https://arxiv.org/abs/2303.04989v1
论文出处 :arxiv 2023.03
代码实现 :https://github.com/httle/ARS-DETR
Idea
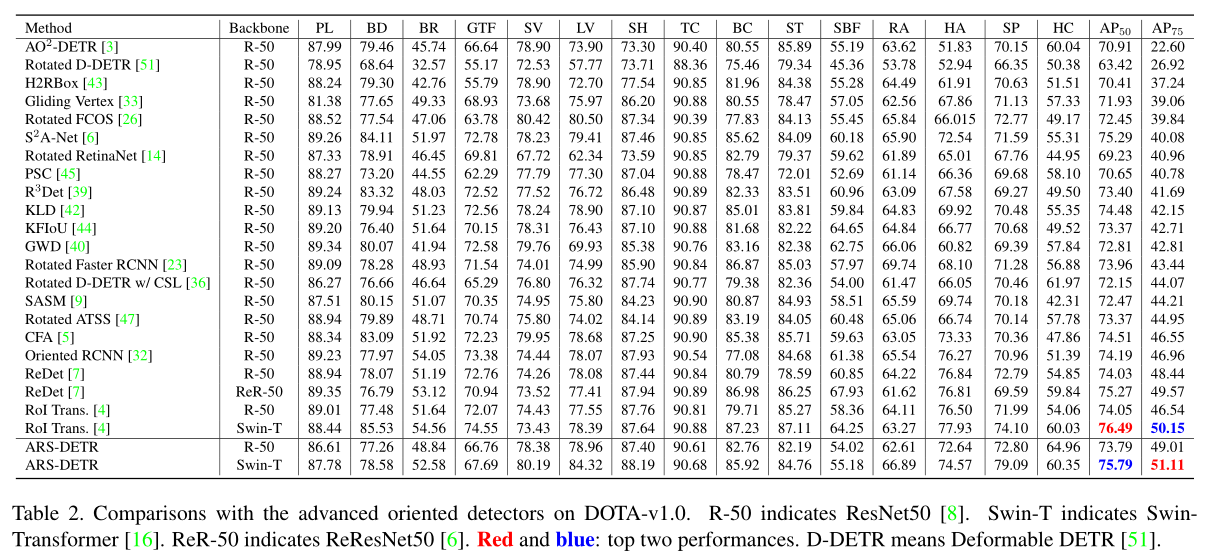
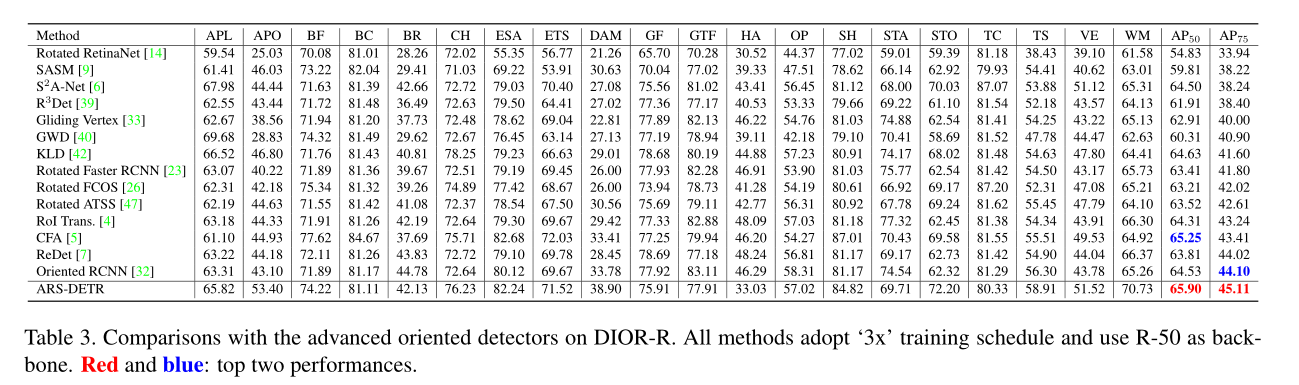
作者认为AP50对角度偏差的容忍度较大,因此使用AP75来衡量模型性能。

作者提出了一种基于Tansformer的横纵比敏感的检测器,具体而言:
- 提出了一种新的角度分类方法,称为AR-CSL(是此前提出的CSL的改进版本),以更合理的方式平滑角度标签。
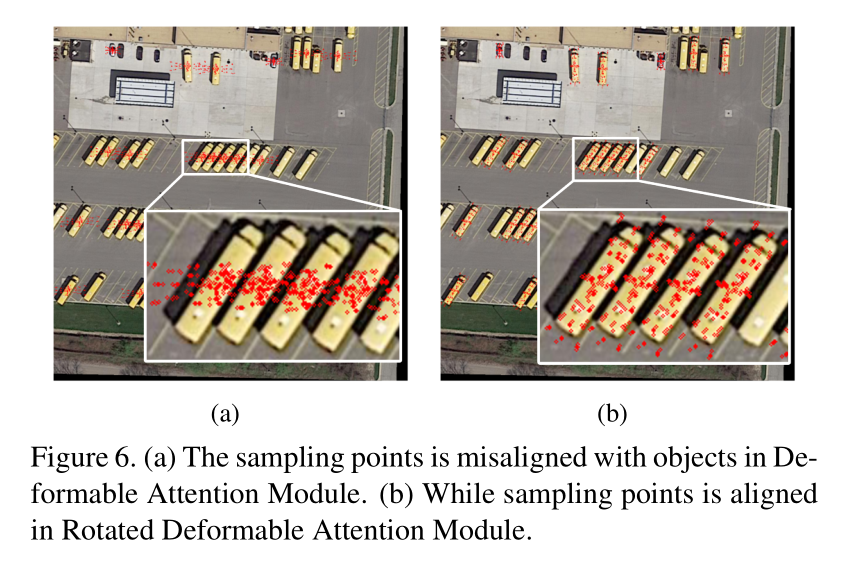
- 设计了一个旋转可变注意力模块,以相同的角度旋转采样点,来消除采样区域特征和采样点之间的错位。
- 另外,根据目标的横纵比,来动态调整权重系数计算角度损失。
Detail
AR-CSL
CSL将角度划分为180个类别,并且将第一个角度和最后一个角度视为相邻的类别,从而将角度回归预测转换为分类任务,来消除角度边界不连续导致的损失。采用高斯窗口函数来平滑角度标签,并反映相邻角度类别的相关性。
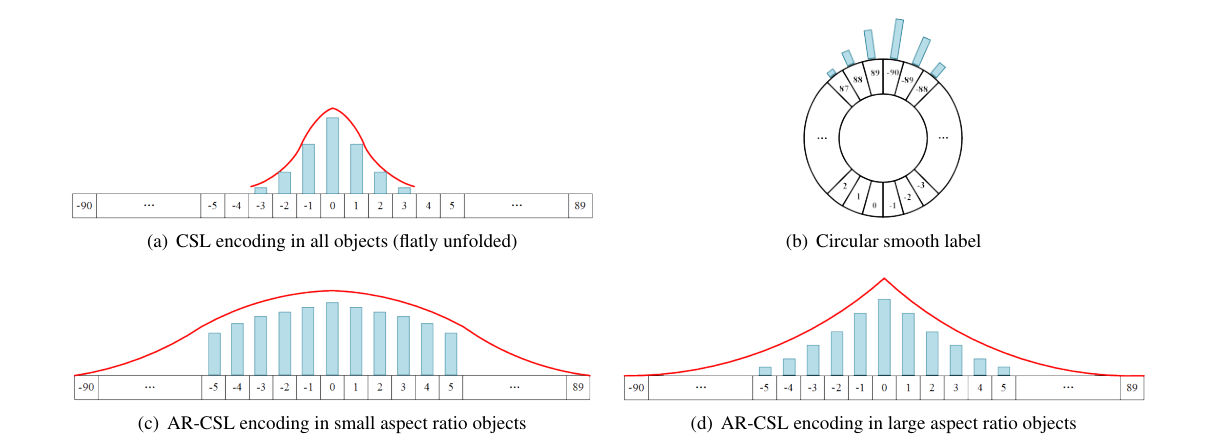
CSL的两个缺点:
- 固定的标签函数:高斯窗口函数
- 引入了超参数:窗口函数的半径,会极大的影响检测器的性能
AR-CSL:
AR-CSL(k,Δθ)=1−SkewIoU(k)minSkewIoU(k,Δθ)−SkewIoU(k)min
SkewIoU(k,Δθ)xy={4ktanΔθ+x+y4ktanΔθ−x−y8ksinΔθ−44Δθ≤2arctank1Δθ>2arctank1=(1−ktan2Δθ)2tan2Δθ=(cosΔθ−2sin22Δθ+ksinΔθ)2
其中k是GT的横纵比。
这样让CSL的窗口函数,直接根据GT的横纵比变化,就可以弥补掉CSL的缺点。
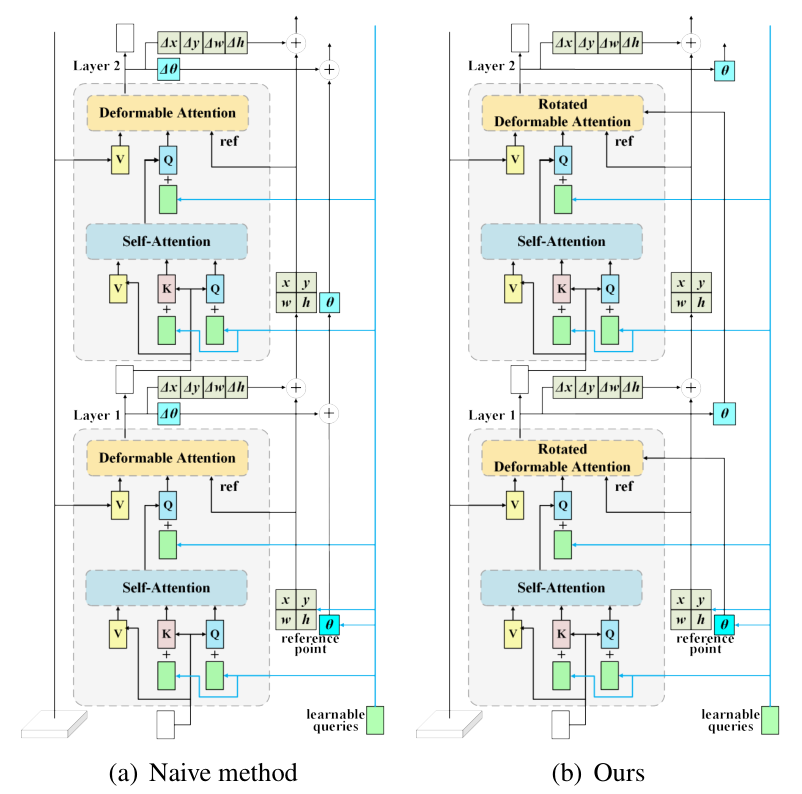
主要区别在这张图上很能反映出来了:
(a):角度信息在每一层之后都是迭代更新的
(b):把角度嵌入到Deformable Attention模块中,然后根据嵌入的角度信息旋转采样点,在每一层之后替换原来的角度。
Aspect Ratio Sensitive Weighting
Lθ→k+1kLθ,Cθ→k+1kCθ
k is the aspect ratio of the objects
Result
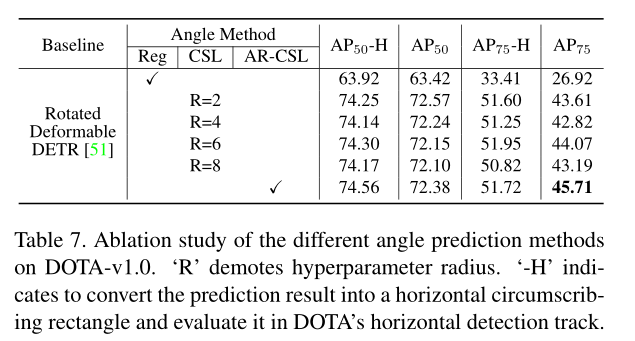
消融实验: