Directional Alignment Instance Knowledge Distillation for Arbitrary-Oriented Object Detection
Introduction
论文题目 :Directional Alignment Instance Knowledge Distillation for Arbitrary-Oriented Object Detection
论文地址 :https://ieeexplore.ieee.org/abstract/document/10227337/
论文出处 :2023’TGARS
代码实现:未公开
Idea
遥感目标检测方向专门的知识蒸馏。
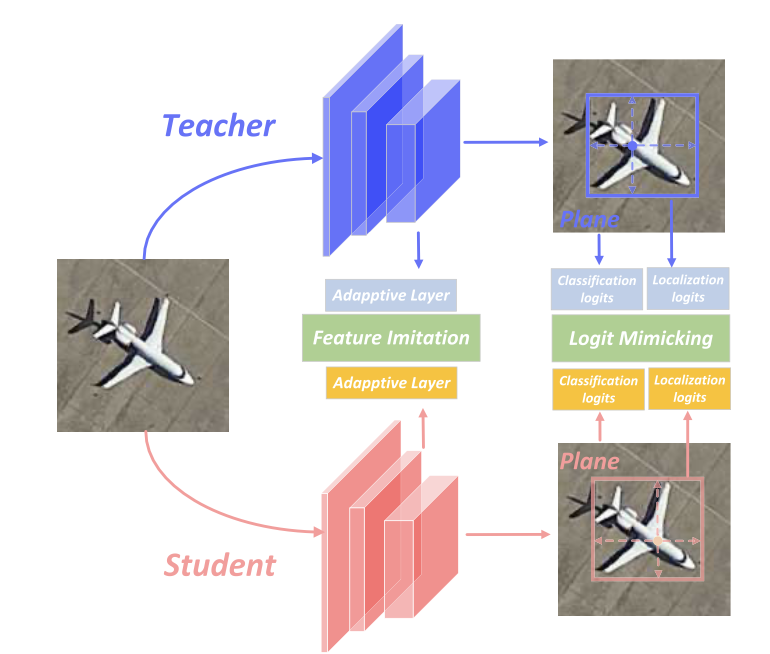
Detail
选择了YOLOv6中提出的Efficient Rep作为backbone和neck.
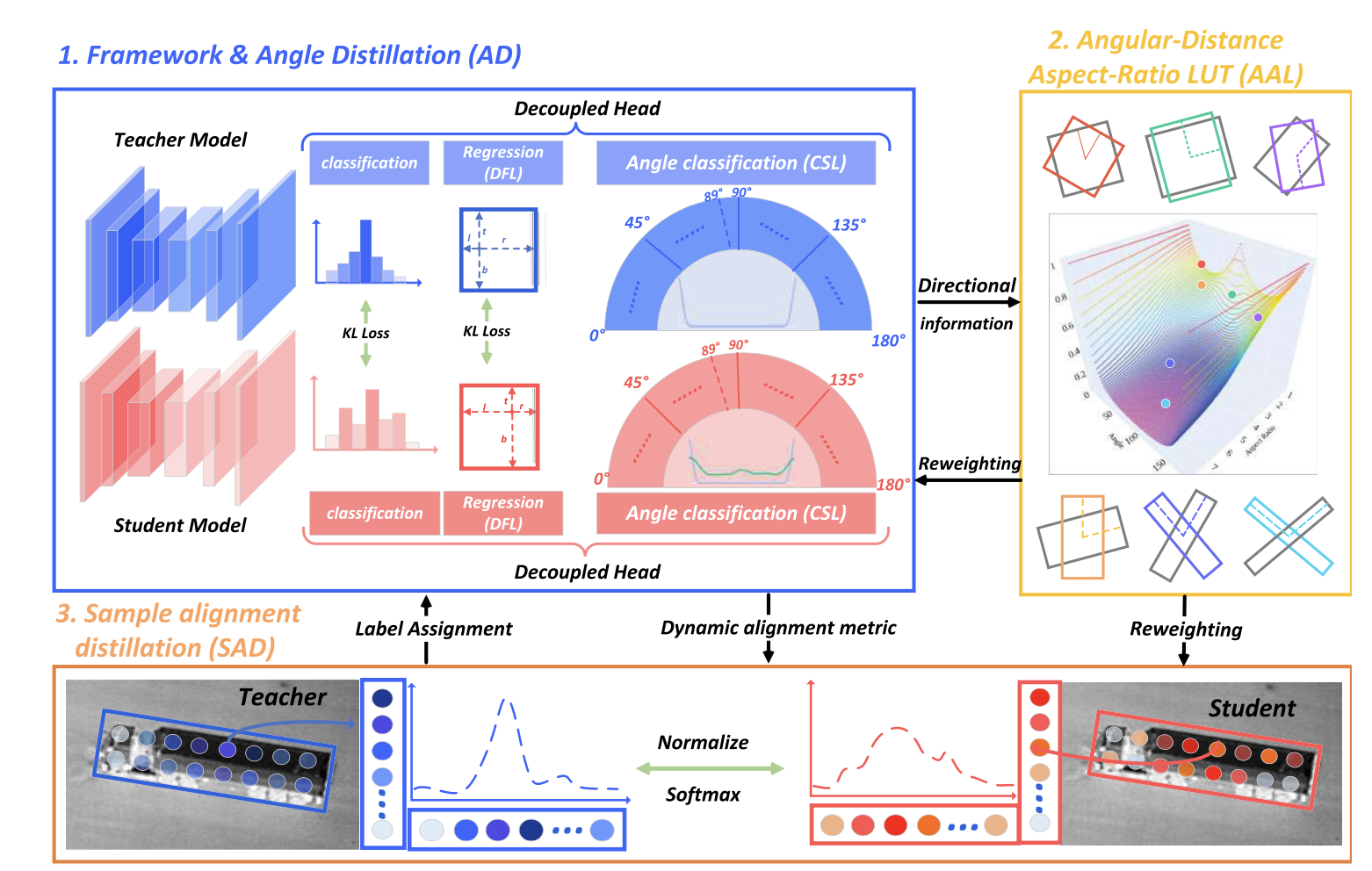
把头部解耦,进一步分解成三个子任务分支:回归分支、分类分支和角度分类分支(CSL)。
Angle Distillation
就是使用CSL将角度分为180个类别,然后使softmax将这些输出的logit转变为类别概率分布:
pθτ=softmax(Sθ,τ)(3)qθτ=softmax(Tθ,τ)(4)Lθ=LCE(Sθ,θcsl)+λθLKL(pθτ∣∣qθτ)(5)
Agnular Distance Aspect Lookup Table
提出了角度距离横纵比(权重)路由表,用于解决角度周期性问题和类正方形问题:
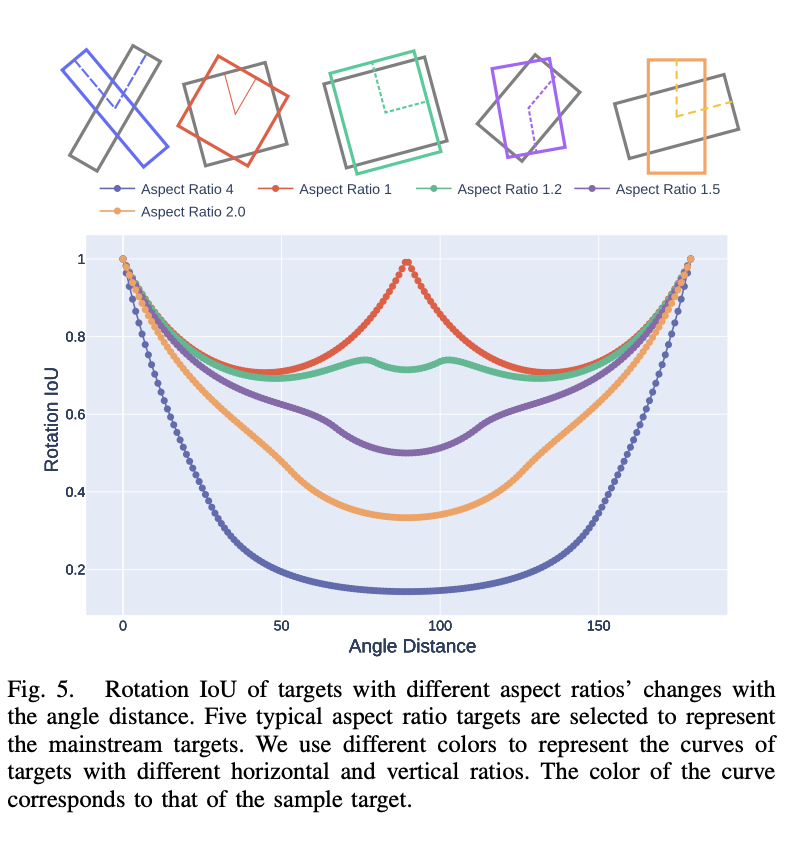
W∗(θ)V(AR)=∣sin(V(AR)×(Δθ))∣={2,1,AR>rotherwise.
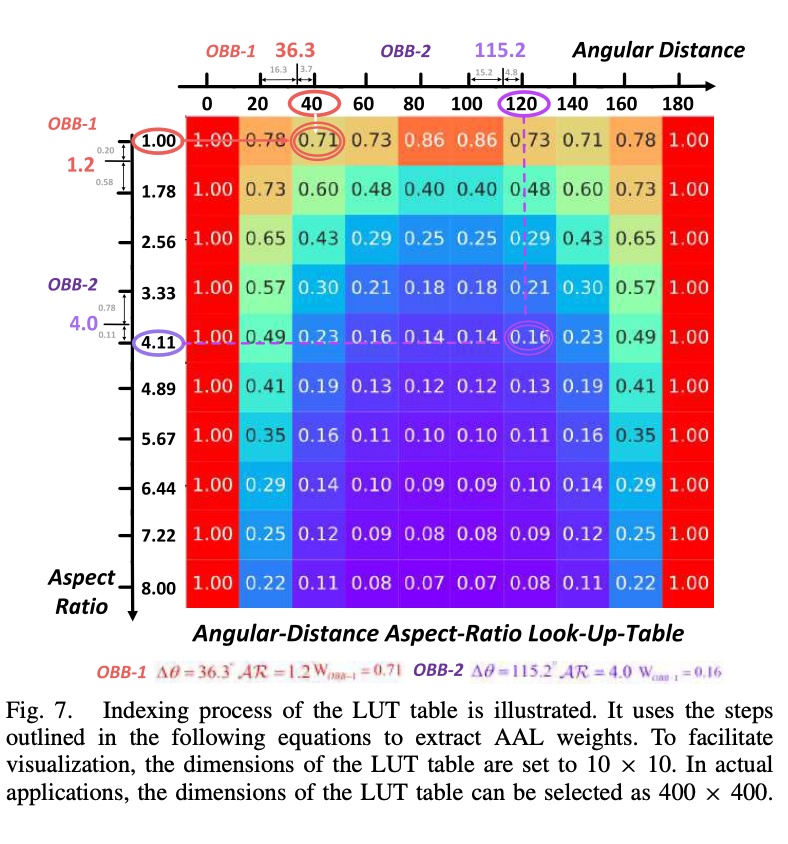
做了一个离散的建模映射,得到权重,并用这个权重重新加权分类分支、回归分支、角度分类分支的损失。
总之,通过这个AAL来提高模型对角度距离和横纵比的敏感性,解决角度周期性问题和类正方形问题。
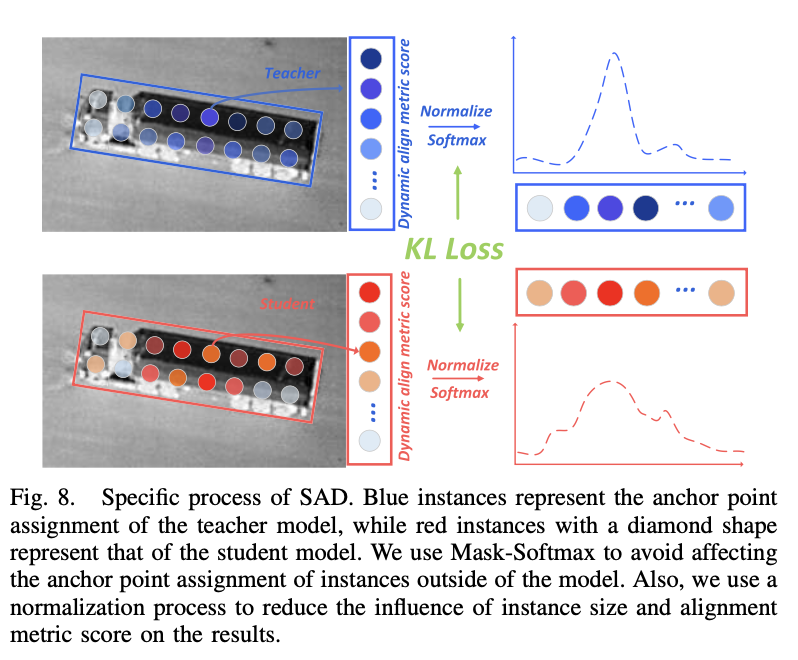
Sample Alignment Distillation
这一部分是专门针对单阶段目标检测的,对anchor point做一个蒸馏。
Loss Function
最后的Loss由四个类别组成,分别是回归分支损失,分类分支损失,角度分类分支损失和SAD模块
- 回归分支损失:IOU:使用的是Generlized focal loss, GIOU + 四条边softmax概率分布
LIoU=1−GloU(B,Bˉ)Lreg=i=1∑NposS^i(LIoU+λregLKL(pregiτ∣∣qregiτ)).
- 分类分支损失:使用的是VarifocalNet中的VFL
Lclass=i=1∑NposVFL(pi,S^i)+λclsLKL(pclassτ∣∣qclassτ).
Lθ=i=1∑NposS^i(LCE(Sθi,θcsli)+λθLKL(pθiτ∣∣qθiτ))
LLA=−K1i=1∑Kj=1∑Njt^ijlogs^ijt^ij.
最后的总损失函数L:
L=λ1Lreg+λ2Lclass+λ3Lθ+λ4LLA.
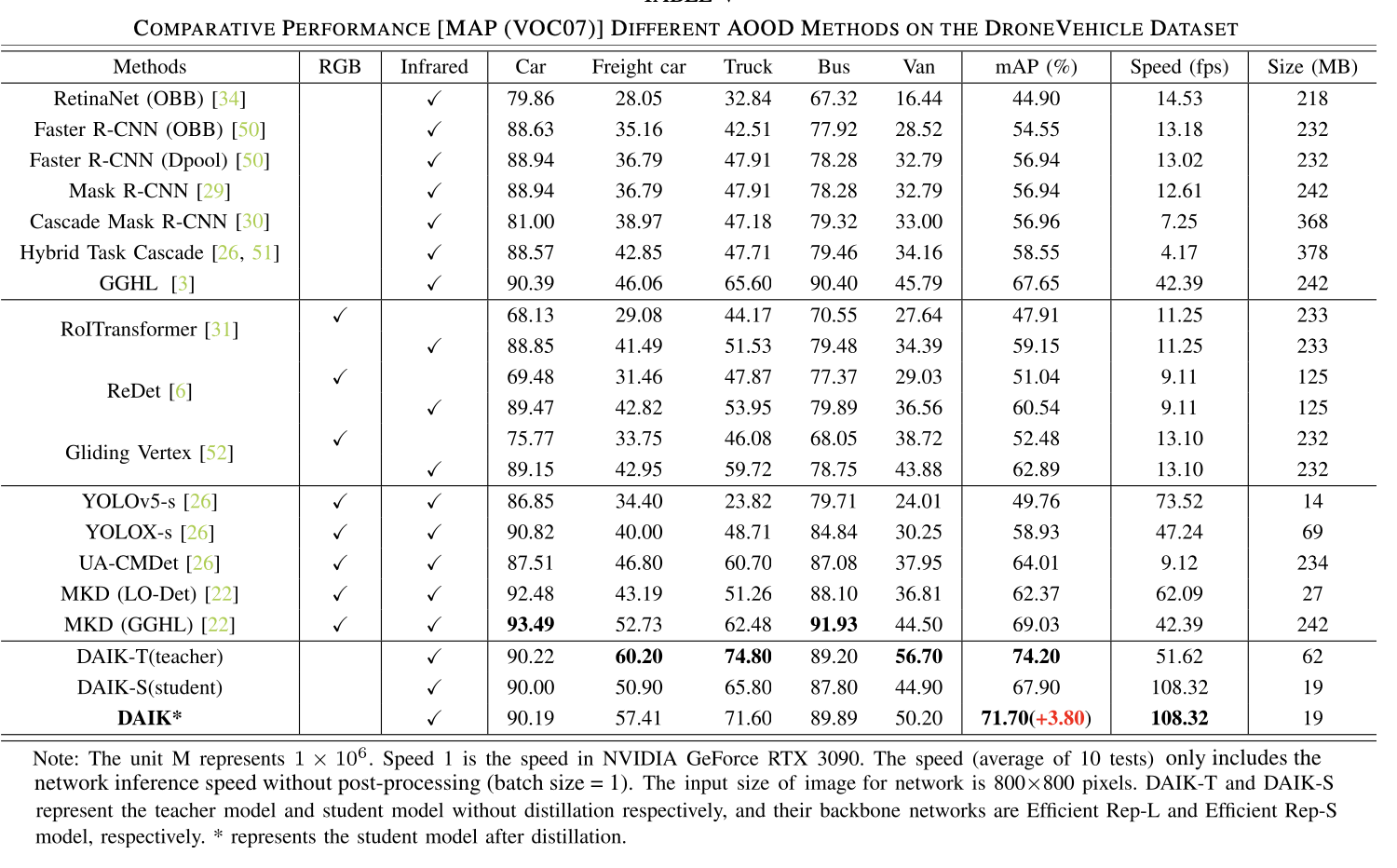
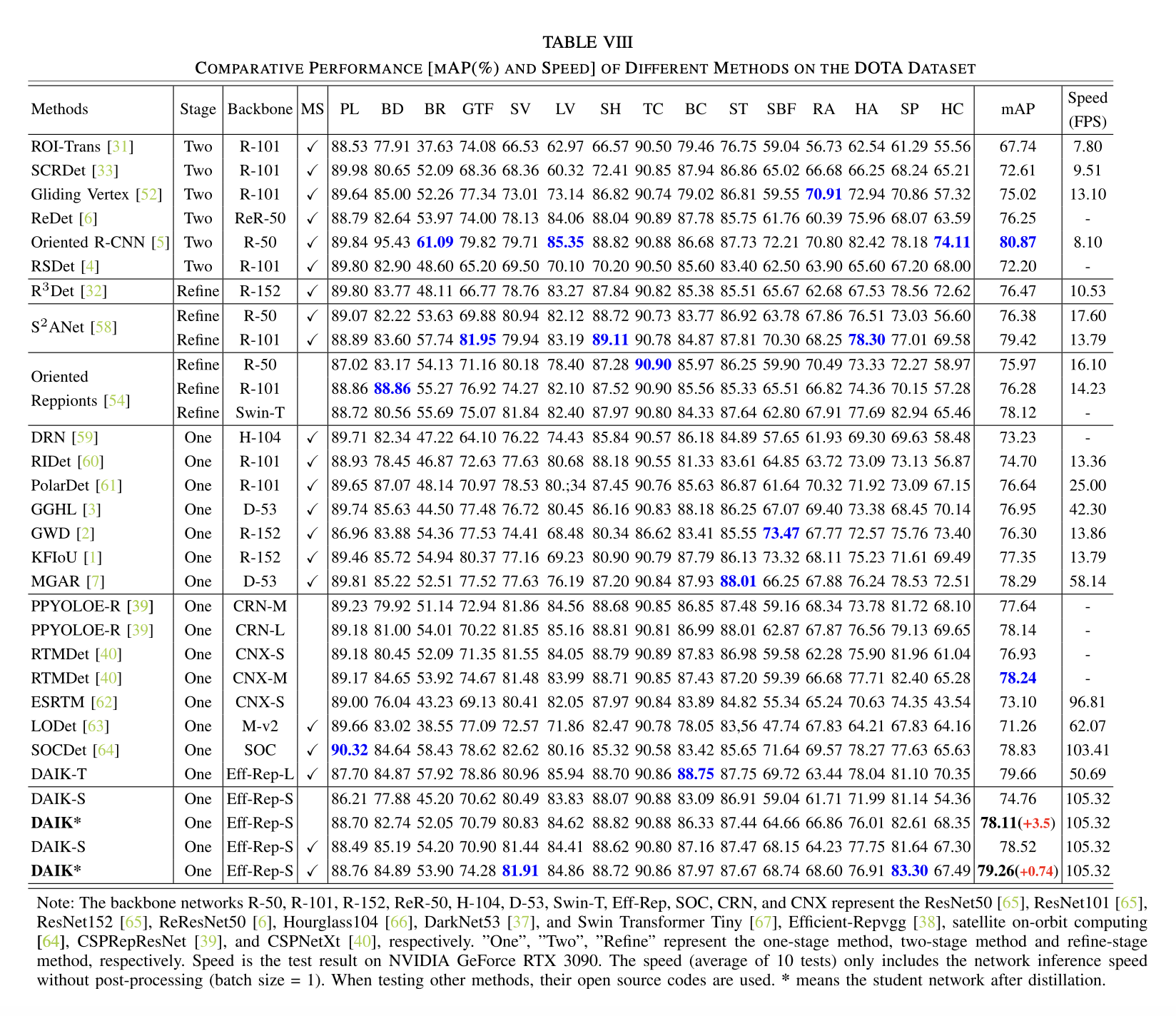
Result
其他
Oriented-rcnn 教师网络 resnet101网络测试结果:
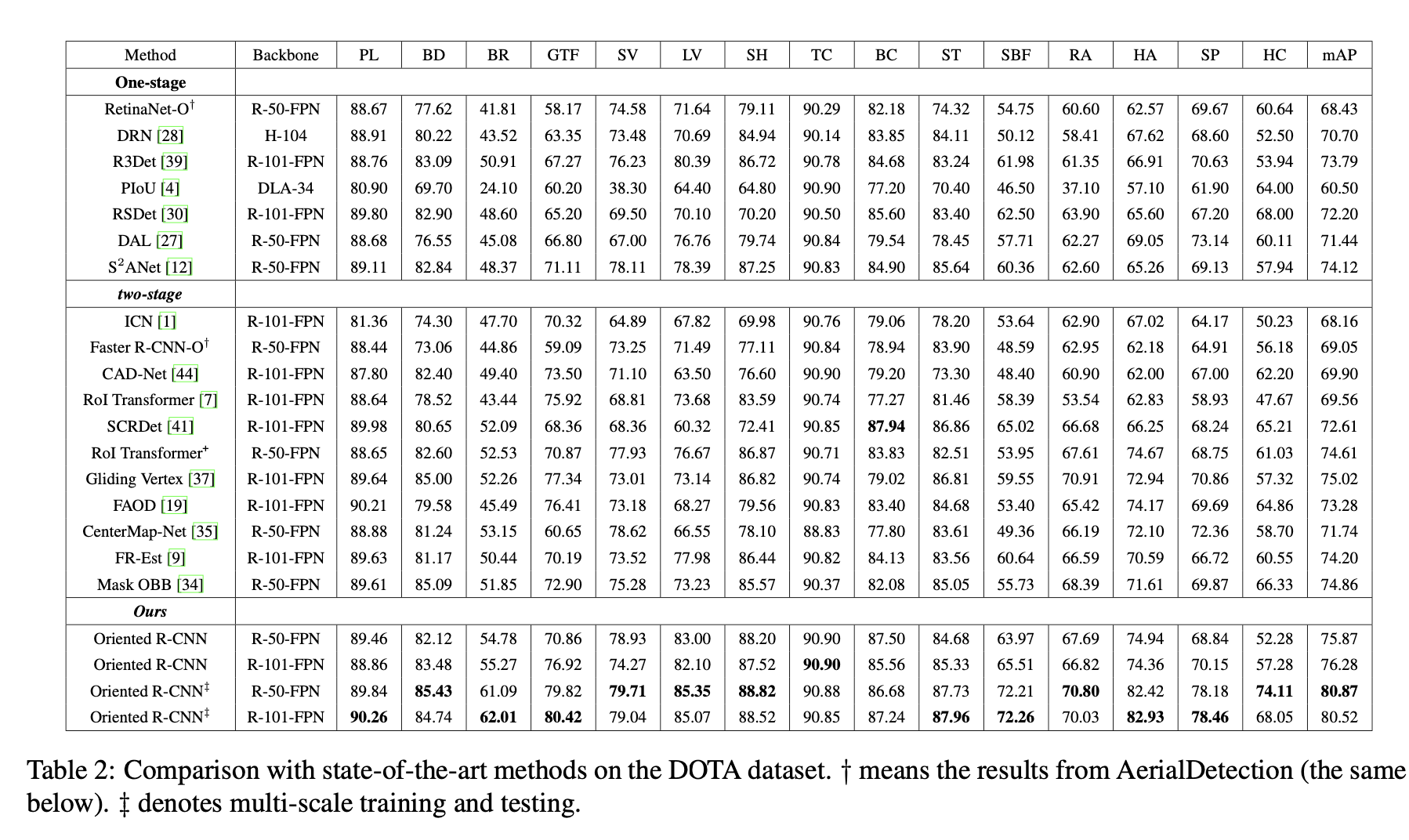
没有蒸馏效果的好