Unleashing the Potential of Knowledge Distillation in Object Detection
Projecting Points to Axes: Oriented Object Detection via Point-Axis Representation
Introduction
论文题目 :Projecting Points to Axes: Oriented Object Detection via Point-Axis Representation
论文地址 :https://arxiv.org/pdf/2406.06999v1.pdf
论文出处 :arXiv
代码实现:https://github.com/zhaozeyang108/Oriented-DETR
Idea
作者提出了一种新的面向目标检测的方法,该方法通过点-轴表示(Point-Axis Representation)来解决航空图像中旋转目标的出现的损失函数出现不连续性(loss discontinuity),并且把该表示法嵌入到DETR检测器中,形成了Oriented-DETR。
Detail
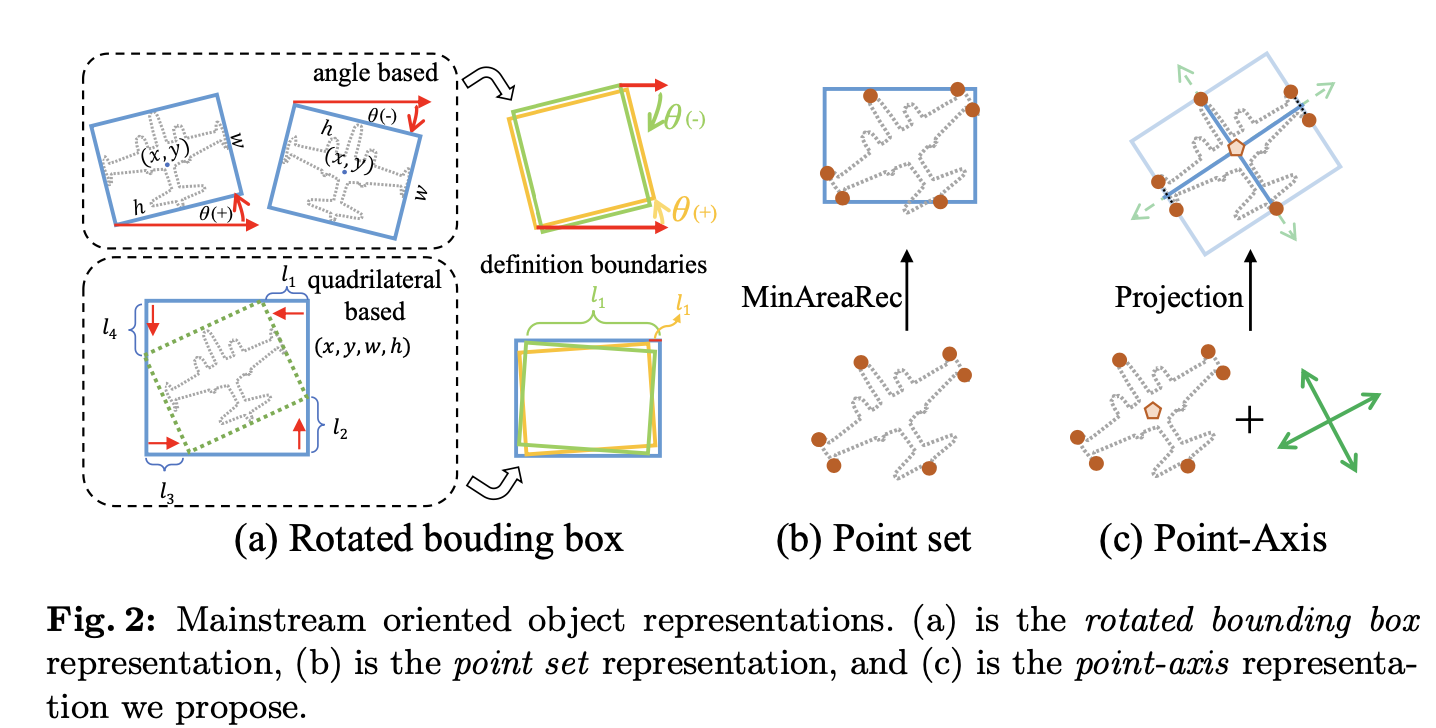
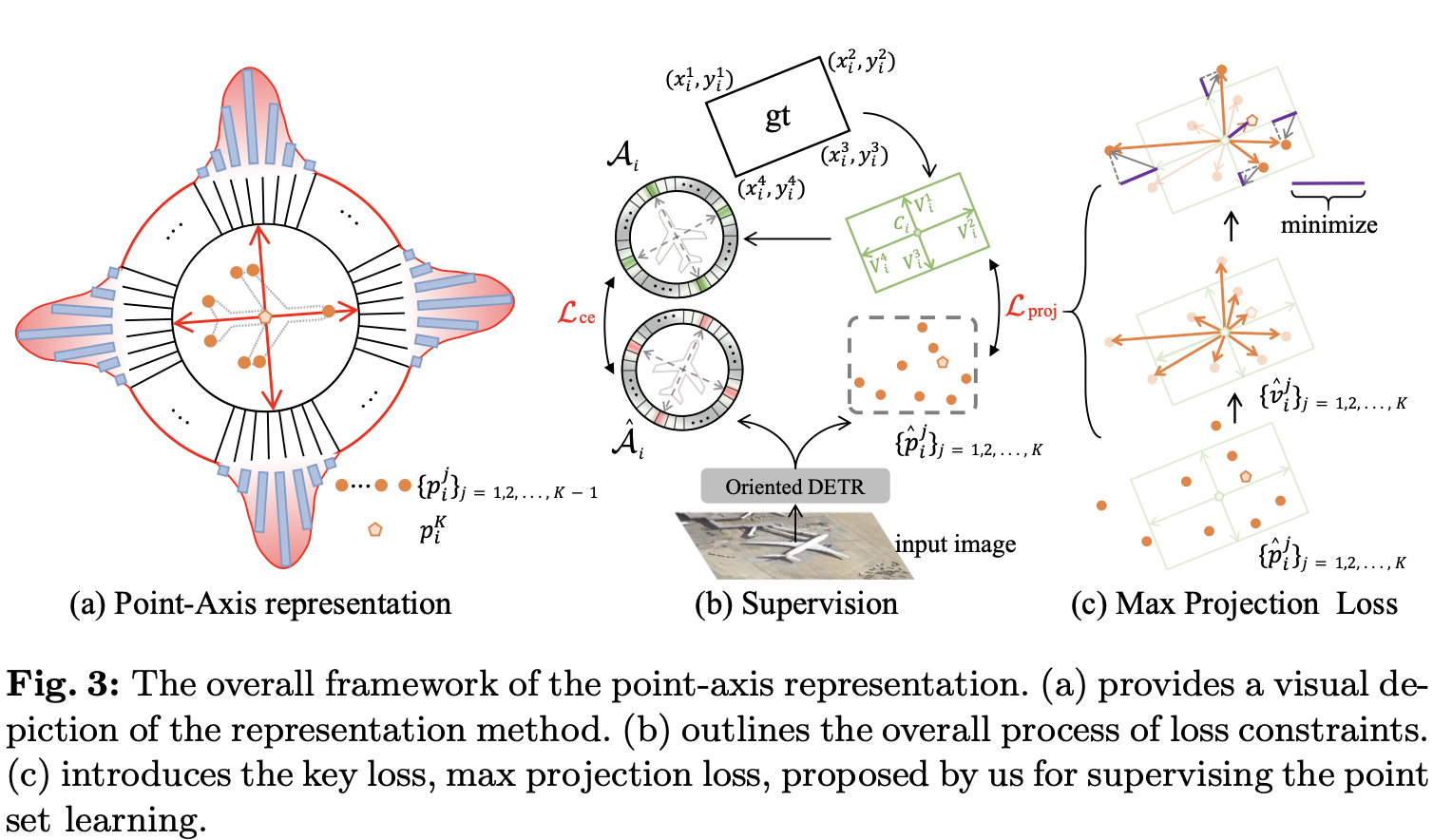
Point-Axis Representation
作者提出的点轴表示法,每个定向对象 i 由一组点 和一个轴表示 的组合来定义。
- 点:用于描述对象的空间范围和轮廓,,第K个点表示物体的中心点
- 轴:定义对象的主要方向性,方向离散化为四峰标签编码。
- 对于每个对象 i,首先将其由四个坐标定义的地面真实边界框转换为中心点 ,并伴有从中心点延伸到边界框边缘的径向向量 。然后以中心点建立坐标系,从这些向量中,得出
Architecture
Oriented-DETR检测架构如下:
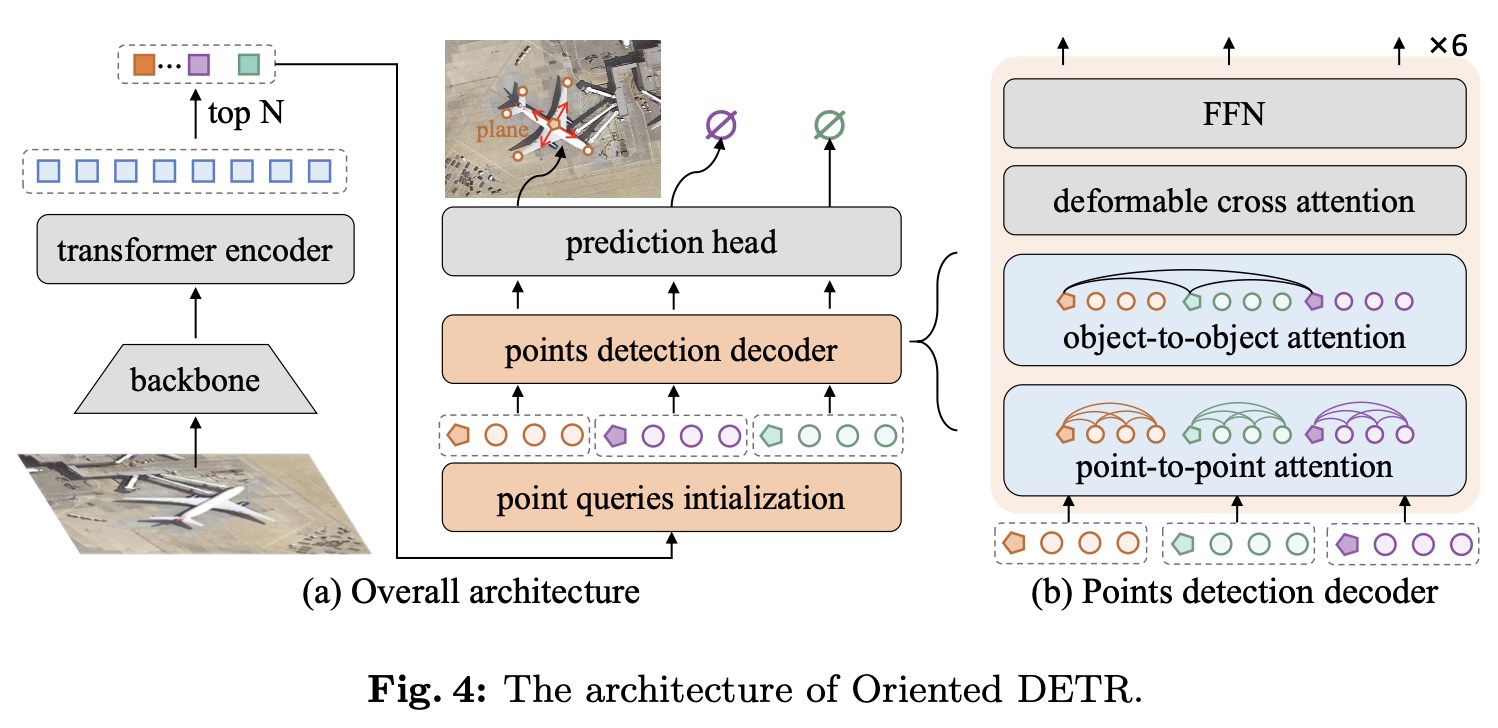
常规的DETR基于特征对应的分数,选择前 N 个分数最高作为对象查询的目标。得到K个对象和其参考点
Oriented-DETR将对象查询转为点查询
中心点:
通过MLP层预测参考点的偏移量,视为中心点。
其他点:
作者定义 K−1 个等距角 ,并以中心点 为原点建立极坐标系,然后利用 MLP 层预测这些方向上物体边界的极坐标并生成其他点的坐标
轴:
预测轴编码 Aˆi
Result
作者在4张4090上训练,在1张4090上推理
在DOTA数据集上的实验结果:

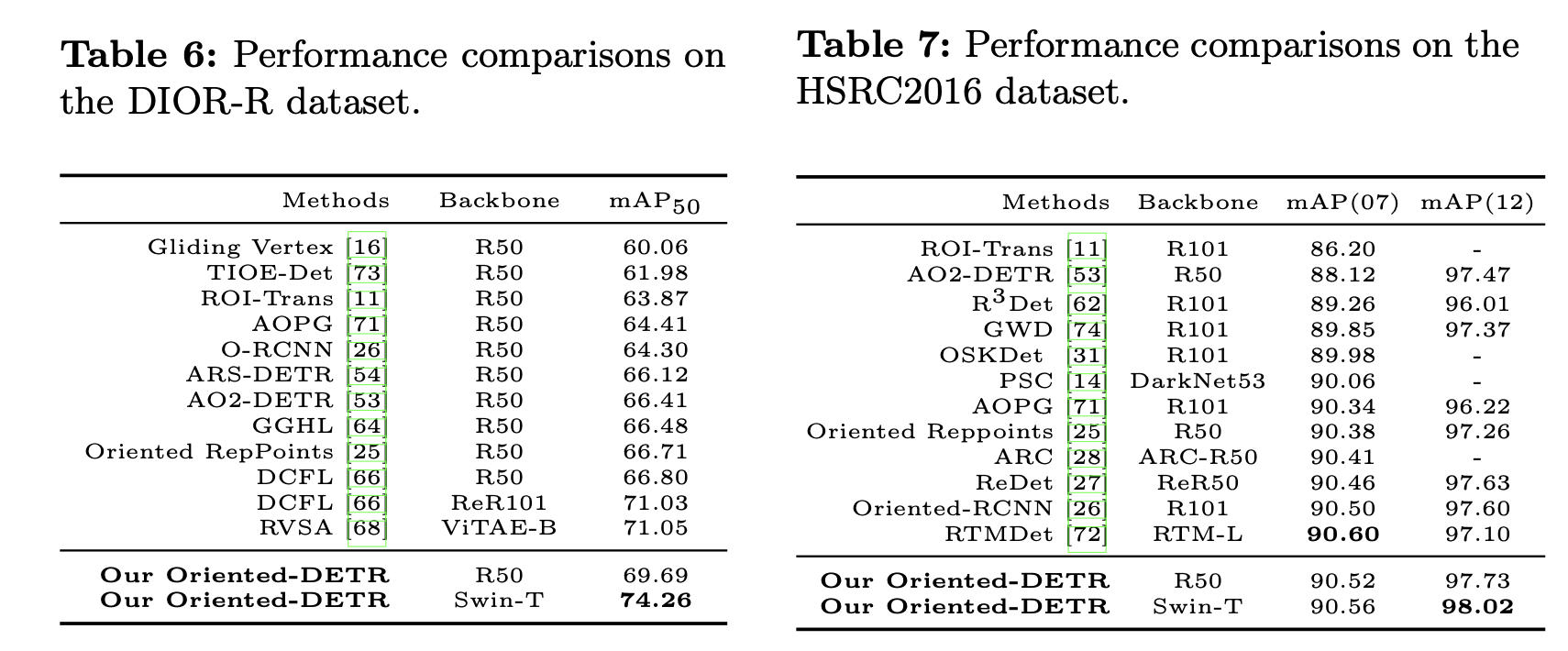
在DIOR-R和HRSC2016数据集上做测试:
实验
目前调通了
本博客所有文章均采用 CC BY-NC-SA 4.0 协议 ,禁止商用,转载请注明出处!